
 myCSUSM
myCSUSM


Your Account:
skip to main content
skip to section navigation

About Devin Jindrich
Dr. Jindrich directs the Laboratory for Integrative Motor Behavior (LIMB) lab. Research in the LIMB Lab focuses on the interactions between biomechanics and motor control that result in effective movement, or “neuromechanics.” We seek to advance our fundamental understanding of how biomechanical and neural systems interact during movement, and apply neuromechanical principles to biomedical applications. Whereas simple mechanical models can describe important aspects of constant-speed forward locomotion, the mechanics and control of maneuvering (changing movement direction) or remaining stable (maintaining a desired movement direction) are less well understood. Consequently, we investigate the mechanisms used by insects, humans, and other animals to maneuver and remain stable during rapid locomotion, towards developing a general framework for understanding the control of maneuverability and stability. The results of these experiments support the hypothesis that musculoskeletal design and physiology can simplify the control requirements for maneuvering and remaining stable. A second focus of the LIMB lab is on using neuromechanics to prevent injuries. We use experimental studies and computer simulations to assess the potential for injuries associated with emerging multitouch computer input devices, with the ultimate goal of helping designers create sets of multitouch gestures that minimize future injury risk. Neuromechanical principles can also make important contributions to improving motor function following injuries. Using rodent and primate animal models, we use neuromechanical techniques to develop more effective therapies and technological interventions for restoring function after neuromotor injury.
Education
- 2001, Ph. D. University of California, Berkeley - Integrative Biology
(Emphasis on comparative biomechanics and physiology) - 1993, B.A. University of California, Berkeley - Integrative Biology
Research
Research in the LIMB lab seeks to discover fundamental principles of biomechanics and motor control, interpret these principles in the context of the physical and occupational environment, and apply basic research discoveries to problems in biomedicine and public health.
RESEARCH AREAS:
- Characterizing the dynamic requirements for maintaining stability and maneuvering during locomotion
- Discovering the behavioral strategies for controlling unsteady locomotion, and the relative roles of musculoskeletal properties and neural output in maneuvering and stability
- Using biomechanics to prevent workplace injury
- Developing methods to quantitatively assess locomotor and upper-extremity function following neuromotor impairment such as spinal cord injury, stroke, and traumatic brain injury
- Developing and evaluating novel approaches for restoring motor function following spinal cord injury; and
- Understanding the mechanisms of spinal learning.
We use comparative experimental studies on a diversity of animals (humans, rodents, primates, insects, birds) to develop and test conceptual and mathematical models. Biomechanical (kinematics, force) and neurophysiological (EMG) measurements describe motor control, and are interpreted in the context of musculoskeletal and neural anatomy and function. Computer simulations can also be valuable tools for hypothesis generation, sensitivity analysis, and engineering design. Overall, the laboratory is committed to using discoveries from basic research to prevent injuries, and develop effective methods for rehabilitation and functional restoration following neuromotor injury. We also seek to develop new and interesting ways to communicate the excitement of new discoveries.
Please refer to the PROJECTS section for more detailed explanations of research projects in the lab.
Courses
| Academic Year | Semester | Course |
|---|---|---|
| 2023 | FALL | KINE 303: STATISTICS AND RESEARCH METHODS |
| 2023 | SPRING | KINE 301: MOTOR CONTROL AND LEARNING |
| 2022 | FALL | KINE 425: BIOMECHANICS |
| 2020 | FALL | KINE 495: INTERNSHIP |
| 2020 | FALL | KINE 202: INTRODUCTION TO KINESIOLOGY |
| 2019 | FALL | KINE 501: MOTOR CONTROL (graduate) |
| 2016 | FALL | KINE 500: ADVANCED BIOMECHANICS (graduate) |
| 2011 | FALL | BIO 181: INTRODUCTION TO BIOLOGY |
(Many courses taught multiple semesters -- only one representative syllabus per course is above)
OPEN SCIENCE
To contribute to open and accessible science, I share most of my course materials online. For example, links to course materials can be found in some of the syllabi above. Additional materials are available below. However, in my estimation, open science must be reciprocal, and based on principles and practices of tolerance and respect. I ask that anyone at institutions that discriminate against vulnerable groups (such as institutions that require religious affirmations for employment, do not protect LGBTQ rights, tolerate discrimination against marginalized groups, or deny the existence of systemic discrimination) NOT use any of the resources that I have posted.
STATISTICS AND RESEARCH METHODS USING SPREADSHEETS
I have developed a set of activities for an active-learning exploration of statistics and research methods in the biological sciences (with an emphasis on health-related applications) using spreadsheets:
Statistics and Research Methods Using Spreadsheets
Using spreadsheets to learn statistics and research methods enables learners to develop their own computer simulations and models. Spreadsheet simulations introduce probability and statistics experimentally, using active, hands-on learning. The activities use an empirical understanding of concepts such as sampling, and approaches like re-sampling (bootstrapping), as a foundation for understanding the mathematical models of parametric statistics. The activities focus on understanding the purpose of statistics and how statistical tests work, instead of learning the particular and proprietary commands of turnkey statistical software such as Jamovi, SPSS, SAS, etc. Using spreadsheets and spreadsheet functions is also a fundamental skill that students can readily transfer to many different contexts, including types of data analysis other than statistics. Spreadsheets provide a much lower barrier to entry than languages such as R, which can be prohibitively difficult for students who have little or no exposure to text-based programming languages. Moreover, as a type of functional programming language, understanding spreadsheets can facilitate learning more abstract platforms if necessary.
SCIENTIFIC REASONING FOR WRITING
I have developed an online reference for scientific reasoning and writing:
Reasoned Writing / A Framework for Scientific Papers
Reasoning is necessary for strong scientific conclusions. Communication is necessary for using scientific conclusions to understand the world and create technology. However, few books or online resources concisely review scientific reasoning and writing together. Therefore, "Reasoned Writing / A Framework for Scientific Papers" seeks to use writing to support reasoning, and reasoning to improve writing.
The "Reasoned Writing" approach focuses on three main areas: Structure, Simplicity, and Specificity.
The modules are intended to help instructors incorporate scientific reasoning and communication into content-based courses (e.g. courses based on case studies and laboratories). A fundamental objective of "Reasoned Writing" is to contribute to equity, by providing scaffolding to simplify, analyze, and thus demystify scientific decision-making and communication.
"BOOK" VERSION
I have compiled the materials that I have developed on statistics, reasearch methods, scientific reasoning and writing into a (very rough) "Book" Format. It's a work in progress, but can be found here:
Statistical Research Methods (using spreadsheets) and Reasoned Writing
INSTRUCTIONAL STRATEGY
My overall approach to education focuses on learning rather than "teaching" per se (more about how the students change than what the instructor does, as there are many effective ways to encourage learning). My goal is to create a positive learning environment for students, using strategies that depend on the course level, topics, class size, format, etc. Within the class environment, students learn from the "field" (e.g. past and current efforts of many researchers to understand and model particular phenomena) with the instructor in a supportive and advisory role. Authority rests in data, not in particular individuals like the instructor, or even in other researchers. The goal of instruction is to help each student develop the skills and perspective necessary to evaluate current models of biological processes based on available evidence.
Many of my goals for learning can be summarized in a "Student Evaluation of Learning Framework" (SELF) that I created to help design and evaluate my courses:
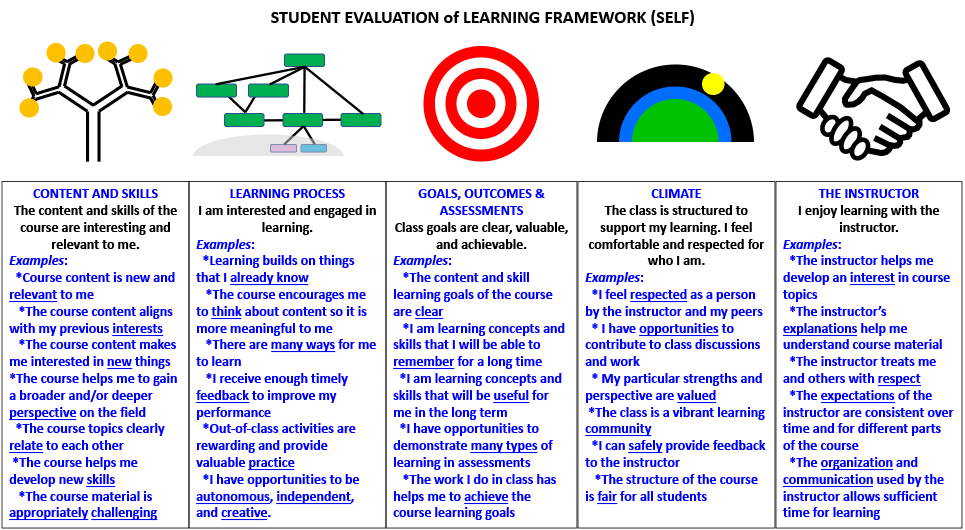
The SELF framework is based the assumption that students will learn effectively when they are motivated, course content is interesting and relevant to them, sufficient scaffolding is provided for meaningful learning, and the students feel safe, respected, and valued by the other members of the class (including the instructor). The SELF framework was included in the Academic Senate's Task-Force to Overhaul Student Opinion Surveys on Teaching as an example of how we might shift instructional assessment towards being more learner-centered, and oriented towards long-term academic success, instead of measuring short-term satisfaction and expediency (as most current surveys do).
A. CONTENT AND SKILLS
Although every course covers different topics and content, there are some common skills that I encourage students to develop in almost every course. Among the skills that I seek to practice are:
Critical thinking. Critical thinking is a very common, but also very challenging, learning outcome. I define “critical thinking” to mean having the background knowledge, research and investigative skills, and reasoning skills necessary to develop scientific hypotheses and defend conclusions using evidence. My approach is partly grounded on the hypothesis that students can occupy several positions of thinking (Table 1).
In the first position, Dualism, students assume that ideas or facts can be unequivocally known as true or untrue. Authorities, such as textbooks or professors, are considered to have knowledge of true facts that they can disseminate to students. Students consider authorities to be responsible for teaching students to distinguish between correct and incorrect ideas.
In the second position, Multiplicity, students question the absolute truth or falsehood of facts. Instead, different opinions are considered equally valid in many areas. Students consider the purpose of education to be encouraging independent thinking and developing individual perspectives.
Finally, Critical understanding involves acknowledging that facts or ideas are not equally valid, but necessarily situated in evidentiary (and even cultural) contexts. The contextual reference of facts and the possibility of competing ideas do not, however, prevent commitments to specific ideas or courses of action. Uncertainty can be overcome by critical evaluation of evidence, and reasoned conclusions can be reached by weighing evidence.
|
Dualism -> |
Multiplicity -> |
Critical Understanding |
|
|---|---|---|---|
|
Assumed nature of knowledge |
Absolute: True or false ideas or facts exist. |
Relative: Absolutely true or false ideas or facts do not exist. All opinions are equally useful. |
Reasoned: Facts and ideas depend on available evidence and context. However, some facts or ideas can be better supported than others. |
|
Process of learning |
Communication of facts and techniques from authorities. |
Independent exploration. Acknowledging different opinions. |
Gathering evidence and constructing arguments. |
|
Role of student |
Memorize or understand factual information. |
Think independently. Form opinions. |
Critically evaluate alternative hypotheses based on evidence. Commit to best supported ideas. |
Simplified from:
Perry, W.G. (1970). Forms of intellectual and ethical development in the college years: a scheme. New York: Holt, Reinhart and Winston.
The “Positions of thinking” of the modified Perry/Baxter Magolda model are complimentary to Bloom’s Taxonomy, with the emphasis that learning how to weigh uncertainty is important for judgment and evaluation. Moreover, this modified Perry/Baxter Magolda Model offers a progression that can serve as a guide towards critical understanding or evaluation.
Developing conceptual frameworks. Firm theoretical frameworks help organize data and generate hypotheses (The National Academies, “How People Learn: Brain, Mind, Experience, and School,” 2000). I have found that structuring a course of study around recurring conceptual frameworks or themes can help students understand general principles (NRC, 2012). Frameworks can also help students learn the terminology and knowledge that are important to the natural sciences. For example, energy flow in biological systems is a framework for my Biomechanics and Physiology courses. Energy flow can help to understand material behavior and failure, fluid mechanics, locomotion, and injury mechanisms. Mechanical energy flow can be linked to metabolic energy requirements to better understand physiology, ecology, and evolution. A main theme of my Motor Control course is to encourage students to DEVELOP their OWN frameworks to analyze complex problems and understand course content. The content of the course is also structured around several frameworks including behavior as an emergent property, the importance of intrinsic dynamics, and desirable difficulties.
Mathematical relationships can be useful quantitative frameworks. Even simple mathematical descriptions of biological processes can identify important variables and reveal the overall behavior of complex systems, and can offer useful frameworks for understanding. Clearly, courses such as Biomechanics extensively apply mathematical frameworks from engineering and physics to biological systems. Even courses such as physiology can use fundamental electrical engineering concepts of resistance (conductance), potential differences, and Ohm's law. Mathematical, engineering, and controls systems frameworks can explain physiological processes such as thermoregulation, osmoregulation and gas transport, and reveal common principles underlying many aspects of morphology, physiology, and behavior. Finally, the framework of scientific reasoning is important for all content areas. For example, I use reasoning as a framework for effective scientific communication (http://reasonedwriting.com/).
Understanding the scientific process. Research findings are limited, to greater or lesser extents, by the theoretical, technological and even cultural environment of research. Whenever possible, I present content knowledge by tracing the scientific process that led to its discovery. I use figures from primary literature sources (instead of, or to support, textbook schematics) to illustrate principles. I expose students to the variability and sources of uncertainty inherent to experimental research. I also seek to involve students in hands-on scientific inquiry. Experience with different types of experiments is useful for helping students to critically evaluate different types of data. I seek to integrate current research into every aspect of my teaching, as advocated by the Carnegie Foundation's Boyer Commission report. Motor control, comparative biomechanics, physiology research are ideal fields for training students to think critically and gain the skills and confidence necessary to evaluate research findings. Integrative research draws from many active research areas, including cell physiology (neural properties, muscle physiology), anatomy (neural organization, musculoskeletal structures), and behavior (mechanical task requirements, mechanical and sensory interactions with the environment) to understand function. I seek to guide students through the process of using concepts learned from chemistry, physics, and biology, to gain critical understanding of, and explore application to, current research problems.
B. LEARNING PROCESS
I seek to help students acquire the knowledge and critical thinking skills necessary to critically understand biological problems. I encourage students to evaluate biological evidence, construct reasoned arguments, and make judgments between alternative hypotheses. I employ a scaffolded, inquiry-based instructional approach, as advocated by the Boyer Commission's Report on Undergraduate Education at Research Universities (Reinventing Undergraduate Education: A Blueprint for America's Research Universities). I employ case studies, class discussions, in-class activities, team projects, written assignments, (limited) lectures, online lecture segments, and spoken presentations. Some of the processes that I emphasize are:
Encouraging students to learn skills as well as content. In my estimation, transformative learning (such as developing the ability to apply reasoning skills to scientific content) involves both skill learning and declarative learning. I often focus less on facts, definitions, and quantity of information and more on helping students construct conceptual frameworks to understand and apply course content. My experience supports the hypothesis that students understand and retain content knowledge more effectively if the students encounter the content themselves, during the process of reasoning and solving problems made relevant to them. However, skill learning also requires making mistakes: trial and correction. Although making mistakes is valuable, the process of trial and correction can be stressful. I try to mitigate academic stress with kindness and flexibility when leading a class.
Inquiry-Based Education. Lectures and textbooks can be useful tools to introduce and explain terminology, concepts, models, and hypotheses. However, short-term case-studies, longer-term projects, laboratory activities, internships, and research participation can help students synthesize and use content knowledge. Active, hands-on learning can help to consolidate and retain information, develop skills, and encourage critical thinking. My inquiry-based projects include at least three aspects: 1) reference to primary literature, to expose students to scientific methods, encourage selective reading skills, and provide experience with variability and uncertainty; 2) hypothesis generation, to encourage reinforce content understanding through creative synthesis; and 3) hypothesis testing through reasoning, to develop critical understanding. Wherever possible, students express understanding with written and spoken presentations. Through mentoring students and inquiry-based coursework, I seek to prepare students to critically understand and evaluate the complex problems that will confront them in their academic and professional careers.
Leveraging new technology. New technologies hold a tremendous potential to contribute to education. However, sheer amount of information available to students and the public through media and the Internet requires people to evaluate data and arrive at reasoned judgments. Memorizing facts will become less and less important as more information is immediately available to everyone. I have long been committed to utilizing new opportunities presented by technology to enhance undergraduate education. For example, when I taught Evolution with David Wake at Berkeley, we used a class website to conduct a "Virtual Discussion Group". The Virtual Discussion Group used electronic mail and the Internet to allow students direct access to the authors of the papers in their course reader. Students were able to ask questions of active researchers at universities around the world. More recently, I have extensively used technology such as empirical models implemented in spreadsheets to facilitate active learning and problem solving, even in an online class setting.
C. GOALS, OUTCOMES, AND ASSESSMENTS
Ken Bain states in the book “What The Best College Teachers Do”: “… learners must (1) face a situation in which their mental model will not work (that is, it will not help them explain or do something); and (2) care that it does not work strongly enough to cause them to stop and grapple with the issue at hand…” (p. 17). At the most general level, I strive for no less than for my courses to be transformative – to apply Bain’s prescription to help students learn new concepts and ways of thinking that affect the way they approach problems for years to come. Inherent in this admittedly ambitious goal is a dilemma: the transformation and life-long learning that I seek to encourage cannot be easily achieved or assessed over the course of a single semester. However, my objective of transformation influences the structure of my courses and my teaching approach.
My goals are for EVERYONE in a course to understand and be transformed -- not by me, but by the course material. My philosophy is that everyone in the course are on the same team, in the same struggle to better understand our world. Therefore, I see my most important role as providing FEEDBACK to students to help them broaden and sharpen their understanding, and the ability to express their understanding. My assessments are evidence-based, in that I give the students the highest assessment that they have provided evidence to support.
D. COURSE CLIMATE: THE IMPORTANCE OF DIVERSITY
I consider it my responsibility as an instructor to respect my students’ potential, and assume that students from many backgrounds, at every institution, can achieve comparable educational success. However, I do not consider the analogy of education as a clearly-defined "pipeline" towards pre-determined goals or standards to be the most useful framework for thinking about learning outcomes. Instead, my background as a research scientist influences my perspective. Modern science depends on diversity to discover and evolve more and more useful models of our world (analogous to the genetic diversity necessary for biological evolution). Therefore, all forms of diversity (of scientific perspective, gender, race/ethnicity, background, etc.) strengthen scientific inquiry. Likewise, diversity strengthens the academic evolution of both individuals and institutions. Students all have different backgrounds, goals, AND paths -- which is a considerable source of strength (Gutiérrez and Rogoff, 2003). Therefore, I consider my role as an instructor to help students develop skills and content understanding that empower them to pursue goals based on their unique individual and social identity.
E. MY ROLE AS AN INSTRUCTOR
Instructors contribute to teaching and student success in many ways. I focus on three roles of instructors when designing courses and learning experiences. First, instructors facilitate learning, acting as “guides on the side.” Guiding learning involves designing activities that lead students through the process of discovery and learning, providing encouragement and constructive criticism, identifying important questions and encouraging students to become actively engaged in their own inquiry. Second, instructors provide examples of the thinking process of their disciplines. Setting an example involves demonstrating the creative process that leads to new ideas (e.g. testable hypotheses), and modeling the evaluation and judgment that underlies critical understanding. Third, instructors derermine the format and content for each course. Instructors have a responsibility to clearly communicate course expectations to students, and design assessments allow students to demonstrate thinking and content knowledge. Instructors are responsible for modeling academic standards and integrity.
I also argue that instructors have a fourth responsibility that in some ways conflicts with the concept of a “guide on the side.” Although guidance, clarity, and communication may be effective for knowledge learning, excessive guidance can actually be detrimental for skill learning. Improving writing, or analysis, or evaluation skills requires attempting to perform tasks without complete guidance – in the presence of perceived uncertainty both in the desired outcome and the best path to reach the outcome. Skill learning depends on making mistakes: having expectations that are not completely structured and allow for errors, trial and correction, and the potential for frustration. Therefore, instructors have a responsibility to cover some areas of uncertainty or at the limits of understanding, and to leave some tasks open-ended: requiring interpretation and problem solving.
COURSE HISTORY
Course Title Legend:
- KINE 202: Introduction to Kinesiology
- KINE 301: Motor Control and Learning
- KINE 303: Statistics and Research Methods
- KINE 425: Biomechanics
- KINE 500: Advanced Biomechanics
- KINE 501: Advanced Motor Control
- KINE 495: Internship
- BIO 181: Introduction to Biology
- KIN 345: Motor Control, Development and Learning
- KIN 494/598: Comparative Biomechanics
|
Year |
Term |
Course |
Section |
Units |
# students |
Other Info |
|---|---|---|---|---|---|---|
| 2023 | Fall | KINE 301 | Lecture | 3 | 40 | |
| 2023 | Fall | KINE 301 | Lab | 1 | 20 | |
| 2023 | Fall | KINE 301 | Lab | 1 | 20 | |
| 2023 | Fall | KINE 303 | Lecture | 3 | 38 | |
| 2023 | Spring | KINE 301 | Lecture | 3 | 60 | |
| 2023 | Spring | KINE 301 | Lab | 1 | 20 | |
| 2023 | Spring | KINE 301 | Lab | 1 | 20 | |
| 2023 | Spring | KINE 301 | Lab | 1 | 20 | |
| 2022 | Fall | KINE 425 | Lecture | 3 | 60 | New preparation. Created active-learning Biomechanics materials based on using spreadsheets to perform calculations and analyze large time-series datasets. |
| 2022 | Fall | KINE 425 | Lab | 1 | 20 | |
| 2022 | Fall | KINE 425 | Lab | 1 | 20 | |
| 2022 | Fall | KINE 425 | Lab | 1 | 20 | |
| 2022 | Spring | KINE 301 | Lecture | 3 | 60 | Implemented "Dynamic Study Guide" to facilitate communication and feedback for large lecture/lab courses. |
| 2022 | Spring | KINE 301 | Lab | 1 | 20 | |
| 2022 | Spring | KINE 301 | Leb | 1 | 20 | |
| 2022 | Spring | KINE 301 | Lab | 1 | 20 | |
| 2021 | Fall | KINE 303 | Lecture | 3 | 36 | |
| 2021 | Fall | KINE 501 | Lecture | 3 | 14 | |
| 2021 | Fall | KINE 501 | Lab | 1 | 14 | |
| 2021 | Spring | KINE 303 | Lecture | 3 | 20 | |
| 2021 | Spring | KINE 301 | Lecture | 3 | 40 | New preparation of course and lab materials for synchronous/asynchronous remote learning. |
| 2021 | Spring | KINE 301 | Lab | 1 | 20 | |
| 2021 | Spring | KINE 301 | Lab | 1 | 20 | |
| 2020 | Fall | KINE 202 | Lecture | 3 | 58 | |
| 2020 | Fall | KINE 495 | Internship | 3 | 49 | |
| 2020 | Fall | KINE 303 | Lecture | 3 | 32 | New Preparation. Created entirely new course for active learning of statistics and research methods in a remote, synchronous/asynchronous format. |
| 2020 | Spring | KINE 495 | Internship | 3 | 48 | |
| 2020 | Spring | KINE 301 | Lecture | 3 | 40 | |
| 2020 | Spring | KINE 301 | Lab | 1 | 20 | |
| 2020 | Spring | KINE 301 | Lab | 1 | 20 | |
| 2019 | Fall | KINE 501 | Lecture | 3 | 22 | New Preparation. |
| 2019 | Fall | KINE 501 | Lab | 1 | 22 | |
| 2019 | Fall | KINE 495 | Internship | 3 | 59 | New Preparation. |
| 2019 | Spring | KINE 507 | Graduate Seminar | 2 | 14 | |
| 2019 | Spring | KINE 301 | Lecture | 3 | 50 | (Took over for another faculty member mid-way through semester) |
| 2019 | Spring | KINE 301 | Lecture | 3 | 36 | Deployed Reasoned Writing/ A Framework for Scientific Papers to support case studies and laboratory assignments. |
| 2019 | Spring | KINE 301 | Lab 1 | 1 | 18 | |
| 2019 | Spring | KINE 301 | Lab 2 | 1 | 18 | |
| 2018 | Spring | KINE 202 | Lecture | 4 | 32 | New Preparation. Focused on reasoning and spoken communication. |
| 2018 | Spring | KINE 301 | Lecture | 3 | 36 | |
| 2018 | Spring | KINE 301 | Lab 1 | 1 | 18 | |
|
2018 |
Spring |
KINE 301 |
Lab 2 |
1 |
18 |
|
|
2017 |
Fall |
KINE 595 |
Practicum |
3 |
10 |
|
|
2017 |
Fall |
KINE 301 |
Lecture |
3 |
36 |
|
|
2017 |
Fall |
KINE 301 |
Lab 1 |
1 |
18 |
|
|
2017 |
Fall |
KINE 301 |
Lab 2 |
1 |
18 |
|
|
2017 |
Summer |
KINE 301 |
Lecture |
3 |
19 |
Re-structured course to use primarily case-study based active learning |
|
2017 |
Summer |
KINE 301 |
Lab |
1 |
19 |
|
|
2017 |
Spring |
KINE 301 |
Lecture |
3 |
35 |
|
|
2017 |
Spring |
KINE 301 |
Lab 1 |
1 |
17 |
|
|
2017 |
Spring |
KINE 301 |
Lab 2 |
1 |
18 |
|
|
2016 |
Fall |
KINE 500 |
Lecture |
3 |
12 |
New preparation |
|
2016 |
Fall |
KINE 500 |
Lab |
1 |
12 |
New preparation |
|
2016 |
Fall |
KINE 301 |
Lecture |
3 |
35 |
|
|
2016 |
Fall |
KINE 301 |
Lab 1 |
1 |
16 |
|
|
2016 |
Fall |
KINE 301 |
Lab 2 |
1 |
19 |
|
|
2016 |
Summer |
KINE 301 |
Lecture |
3 |
18 |
|
|
2016 |
Summer |
KINE 301 |
Lab |
1 |
18 |
|
|
2015 |
Fall |
KINE 301 |
Lecture |
3 |
36 |
|
|
2015 |
Fall |
KINE 301 |
Lab 1 |
1 |
18 |
|
|
2015 |
Fall |
KINE 301 |
Lab 2 |
1 |
18 |
|
|
2015 |
Spring |
KINE 301 |
Lecture |
3 |
36 |
|
|
2015 |
Spring |
KINE 301 |
Lab 1 |
1 |
20 |
Scientific writing online lectures recorded (10 sections) |
|
2015 |
Spring |
KINE 301 |
Lab 2 |
1 |
16 |
|
|
2014 |
Fall |
KINE 301 |
Lecture |
3 |
36 |
|
|
2014 |
Fall |
KINE 301 |
Lab 1 |
1 |
20 |
New Prep: troubleshot lab equipment, developed, tested and implemented new lab activities |
|
2014 |
Fall |
KINE 301 |
Lab 2 |
1 |
16 |
|
|
2014 |
Summer |
KINE 301 |
Lecture |
3 |
28 |
|
|
2014 |
Spring |
KINE 301 |
Lecture 1 |
3 |
32 |
My online lectures used as content for 2 Temecula sections |
|
2014 |
Spring |
KINE 301 |
Lecture 1 |
3 |
32 |
|
|
2013 |
Fall |
KINE 301 |
Lecture 1 |
3 |
35 |
Lectures split into 82 question-based segments and online lectures re-recorded |
|
2013 |
Fall |
KINE 301 |
Lecture 2 |
3 |
35 |
|
|
2013 |
Summer |
KINE 301 |
Lecture |
3 |
15 |
|
|
2013 |
Spring |
KINE 301 |
Lecture 1 |
3 |
35 |
Case studies, Scientific Writing Detailed course evaluations implemented |
|
2013 |
Spring |
KINE 301 |
Lecture 2 |
3 |
35 |
|
|
2012 |
Fall |
KINE 301 |
Lecture 1 |
3 |
36 |
Full (1+ hour) online lectures recorded and employed |
|
2012 |
Fall |
KINE 301 |
Lecture 2 |
3 |
35 |
|
|
2012 |
Summer |
KINE 301 |
Lecture |
3 |
15 |
|
|
2012 |
Spring |
KINE 301 |
Lecture 1 |
3 |
35 |
Start at CSUSM |
|
2012 |
Spring |
KINE 301 |
Lecture 2 |
3 |
35 |
|
|
2011 |
Fall |
BIO 181 |
Lecture |
4 |
378 |
ASU (Intro. Biology., New prep.) |
|
2010 |
Fall |
KIN 345 |
Lecture |
3 |
157 |
ASU (Motor Control) |
|
2010 |
Spring |
KIN 345 |
Lecture |
3 |
154 |
ASU (Motor Control) |
|
2009 |
Fall |
KIN 494/598 |
Lecture |
3 |
25 |
ASU (Comparative Biomechanics, Ugrad+ Grad) |
|
2009 |
Spring |
KIN 345 |
Lecture |
3 |
168 |
ASU (Motor Control) |
|
2008 |
Fall |
KIN 494/598 |
Lecture |
3 |
31 |
ASU (Comparative Biomechanics, Ugrad+ Grad, New Prep.) |
|
2008 |
Spring |
KIN 345 |
Lecture |
3 |
150 |
ASU (Motor Control, New prep.) |
Vitae
DEVIN L. JINDRICH
Department of Kinesiology
California State University, San Marcos
333 S. Twin Oaks Valley Rd.
University Hall 302
San Marcos, CA 92096
760-750-7334
Projects
RESEARCH INTERESTS
AREA 1: UNSTEADY LOCOMOTION
I direct the Laboratory for Integrative Motor Behavior (LIMB) lab. Research in the LIMB lab aims to discover fundamental principles underlying the biomechanics and neural control of movement, interpret these principles in the context of the physical and occupational environment, and apply basic research discoveries to current problems in biomedicine and public health. My research approach is integrative: addressing many levels of organization to better understand and contextualize motor function and control. I use theoretical models, computer simulations, and experimental studies in animals and humans to address basic and applied research questions. Research in my laboratory primarily focuses on three areas: (1) Conducting basic research to understand the mechanics and motor control of unsteady locomotion (stability and maneuverability); (2) Applying biomechanical and motor control principles to prevent injuries associated with human-computer interactions; and (3) Developing effective strategies for restoring function following neuromotor injuries (i.e. spinal cord injury). I am currently involving both undergraduate students and post-doctoral trainees in several projects related to each of these areas. Below are brief descriptions of the projects, research findings to date, and plans for continuing the research at CSU San Marcos.
The mechanics and control of stability and maneuverability are little understood compared to constant-average-speed locomotion (Jindrich and Qiao (2009) Chaos, 19(2): 026105). Current research focuses on characterizing the task-level control strategies that are used to control unsteady locomotion: to generate maneuvers and to maintain stability. Experimental studies will contribute to the ultimate goal of identifying the specific control policies used by the CNS to account for complex system dynamics when planning and executing movements to attain behavioral goals. Our experimental focus is on identifying the task-level parameters that are actively controlled during walking and running maneuvers within the framework of a simplified mathematical model. I am also interested in the extent to which active control of unsteady locomotion can be separated from the inverted-pendulum and spring-mass “templates” that govern locomotion mechanics.

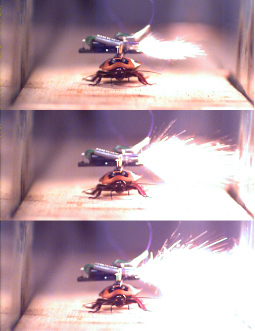
Cockroach on photoelastic gelatin
Background: In initial studies on horizontal-plane maneuverability, I introduced the hypothesis that two mechanical requirements constrain the mechanisms available for maneuvering in the horizontal plane (i.e. turning): A) The movement direction of the center of mass (COM) must be changed, and B) the body must be rotated to face the new direction of COM movement. A force impulse must deflect the COM movement direction, and an appropriate torque impulse must also be generated to rotate the body. Based on these force and torque requirements, I developed a simple mathematical model of the task requirements for maneuvering that made specific predictions of the force production necessary to turn during running. I initially tested the model using insects and found that it was able to describe leg force production for each of the legs (Jindrich and Full, (1999). J. exp Biol. 202: 1603-1623).
MANEUVERABILITY
In collaboration with Thor Besier and David Lloyd (at Stanford and University of Western Australia, respectively), I tested the model on human cutting maneuvers during running. We found that this simple algebraic model could explain 70% of the variance in braking forces during sidestep cutting maneuvers of different degrees, and surprisingly even of crossover cutting maneuvers (Jindrich et al. (2006), J Biomech, 39: 1611-1620). Braking forces observed during running turns contributed to prevent body over-rotation during turning. Subsequent experiments in collaboration with Alan Wilson at the Royal Veterinary College (U.K.) have shown that the simple model can also explain the ground-reaction forces used by ostriches to turn. Based on morphology and behavior, ostriches were observed to require less braking force than humans during running turns, consistent with predictions of the model (Jindrich et al. (2007), J Exp Biol, 210(8), 1378-90).
CURRENT RESEARCH: HUMANS.
Studies in my lab currently seek to understand how the nervous system works within the mechanical constraints and capabilities of the musculoskeletal system to achieve stable maneuvers. Working with an undergraduate student (Brian Brown) and Ph.D. student (Mu Qiao), we conducted experiments to assess the behavioral consequences of perturbations to two morphological parameters of the maneuvering model: mass (M) and rotational inertia (I). We constructed a rigid backpack frame with poles attached at the waist, extending fore and aft. The apparatus weighs 5.7 kg. The pack is tightly fitting and adjustable to each participant. By adding mass to different locations fore and aft of the center of mass (COM), M and I can be independently changed. Changes in M of approximately 15% can increase I about the vertical axis by 1-3 times. We collected kinematics using a VICON® 3-D motion tracking system, and ground-reaction forces using two force platforms (Bertec) covered by rubber mats to obscure their location. Subjects ran at 3 m/s and executed sidestep cuts with their right leg. Contrary to our hypothesis that increasing I would decrease braking forces, braking forces remained consistent at different rotational inertias, facilitated by anticipatory changes to horizontal plane body rotational speed. Moreover, increasing inertia revealed that the opposing effects of several turning parameters (i.e. initial rotation and rotation due to medio-lateral forces) result in a system that is robust to changes in rotational inertia. These results suggest that in submaximal effort turning, legged systems may be robust to changes in morphological parameters, and that compensations can involve relatively minor adjustments between steps to change stance initial conditions. We have published a manuscript describing these results (M. Qiao, B. Brown, and D. L. Jindrich. J Exp Biol 217(3): 432-43)

Human Inertia Increaser
STABILITY
CURRENT RESEARCH: ANIMALS.
I have made preparations for studies using the comparative method to identify general principles underlying maneuverability performance. I worked with two undergraduates (Alex Wilson and Ara Austin) to design experiments and build equipment necessary to determine the biomechanics and motor control of rats performing two different types of maneuvers (incline running and turning).
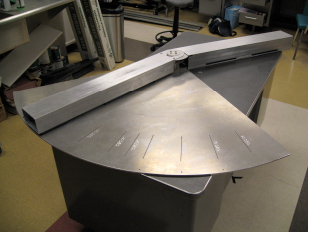
Small animal maneuvering trackway

Rodent traversing miniature force platform
Background: Important aspects of constant-speed locomotion in the sagittal plane can be described by a relatively simple mechanical analog, the spring-loaded inverted pendulum (SLIP). In addition to well-established energetic benefits of SLIP mechanics, appropriately-designed SLIP systems can also be inherently stabilizing. Stability in this context refers to re-entrant patterns of movement that persist and can attenuate the effects of small perturbations over time. With minimal or no control, bipedal walking and running systems can theoretically exhibit stable behavior if they are appropriately designed. Minor adjustments to leg stiffness and geometry afford a degree of dynamic stability in the sagittal plane when subject to larger perturbations. Humans have been shown to use some of these passive dynamical stabilizing mechanisms to simplify locomotion control.
In addition to passive dynamics, musculoskeletal structure and physiology can contribute to stabilizing rapid locomotion (Jindrich and Full (2002). J. exp Biol. 205, 2803-2823). Inherent properties of active muscles can serve to reject perturbations and alter or reduce the requirements for neural control. However, although passive physiological properties can contribute to locomotion stability, they are insufficient to explain the capabilities and behavior of walking and running animals and humans. Active control of dynamic stability is therefore necessary. I therefore seek to determine how neural control interacts with passive dynamic and muscle physiology to power and stabilize locomotion.
Direct perturbations of locomotion to investigate stability
Current Research: To investigate the task-level control policies used by humans to stabilize locomotion, I worked with a graduate student (Mu Qiao). To date, there has been little research on the control policies used by bipeds to maintain stability during locomotion. However, in the 1980s, Raibert and colleagues designed and built dynamically-stable robots inspired by running animals. The controller for these bouncing robots could maintain stable running by independently controlling hopping height, body attitude, and forward running speed without requiring complex, global models of locomotion dynamics. These parameters could, in turn, be controlled by adjustments to initial foot placement, leg stiffness, and by generating torques about the hip. Despite its simplicity, Raibert’s controller could be used to control multiple legs in two- and three-dimensional movements. Raibert’s robots demonstrated that relatively simple control strategies are capable of stabilizing SLIP systems. Humans have the capacity for substantially more sophisticated motor control of locomotion than used by Raibert’s robots. However, the active, task-level control policies used by humans to stabilize legged locomotion are not well understood.
We conducted experiments to test whether humans use control strategies analogous to those used by Raibert’s robots to stabilize running. Specifically, we tested the hypotheses that: 1) humans control running height by modulating leg force (not stance duration), 2) humans control running speed by changing stance leg placement relative to a “neutral point”, and 3) humans control body attitude using hip torques. We studied movements and forces of humans performing five running tasks that changed body height, speed, and orientation. The strategies used to perform these tasks were most often consistent with robotic control principles. Leg force was linearly related to running height. Running speed was changed by adjusting fore-aft foot placement. Body orientation could be modeled as a first order proportional-derivative feedback system. These results suggest that the interaction of independent feedback control strategies could be employed by humans to maintain stable running. (M. Qiao and D.L. Jindrich (2012) PLoS One. 7(12):e51888).Current Research: To investigate the task-level control policies used by humans to stabilize locomotion, I worked with a graduate student (Mu Qiao). To date, there has been little research on the control policies used by bipeds to maintain stability during locomotion. However, in the 1980s, Raibert and colleagues designed and built dynamically-stable robots inspired by running animals. The controller for these bouncing robots could maintain stable running by independently controlling hopping height, body attitude, and forward running speed without requiring complex, global models of locomotion dynamics. These parameters could, in turn, be controlled by adjustments to initial foot placement, leg stiffness, and by generating torques about the hip. Despite its simplicity, Raibert’s controller could be used to control multiple legs in two- and three-dimensional movements. Raibert’s robots demonstrated that relatively simple control strategies are capable of stabilizing SLIP systems. Humans have the capacity for substantially more sophisticated motor control of locomotion than used by Raibert’s robots. However, the active, task-level control policies used by humans to stabilize legged locomotion are not well understood.
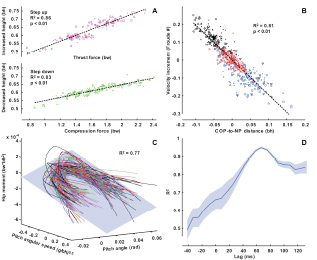
Stability strategies used by humans are consistent with robotic control algorithms
RESEARCH PLANS AT CSUSM: HUMANS
I plan to conduct experiments to understand the relative contributions of musculoskeletal, reflex, and higher-order neural systems to stabilizing locomotion using biomechanical, neurophysiological, and direct perturbation studies. My ultimate goal is to identify general, task-level control principles that govern stability and maneuverability, and understand the underlying physiological mechanisms. Initial experiments will investigate whether humans use common control strategies to generate the active perturbations used to maneuver, and to stabilize locomotion when subject to external perturbations. To this end, I built a custom split-belt, force-sensor-mounted treadmill and a perturbation device based on a linear motor.

Split-belt instrumented treadmill system
Animal experiments sought to investigate whether perturbations of body weight (i.e. as caused by obesity) affected maneuverability, and resulted in other effects such as increased exposure to mechanical loading that could be associated with inflammatory syndromes (i.e. osteoarthritis and Type II diabetes). Animal experiments also sought to understand maneuverability in a comparative, evolutionary context. I am planning to investigate whether these studies can be continued in some form with animals that do not require vivarium facilities (e.g. crabs).

Perturbation apparatus
AREA 2: PREVENTING INJURIES ASSOCIATED WITH HUMAN-COMPUTER INTERACTIONS
A second aspect of my research is using basic research in biomechanics and motor control to prevent injuries. I have focused on evaluating human-computer interfaces, towards interventions that reduce injuries associated with computer work and the next generation of multi-touch and gestural interfaces. Understanding the mechanics and motor control of multi-touch/gestural interfaces involves basic research on the generation of sequences of complex fine motor movements, with direct public health implications.
Background: Since 1980, there has been a rise in the incidence rates of chronic musculoskeletal disorders, such as low back pain and carpal tunnel syndrome, reported in the United States (BLS Data, www.bls.gov). From 1980 to 2000, across all industries, the incidence rate increased from 3.6 to 26 new cases per 10,000 workers. Although the injury mechanisms of chronic musculoskeletal disorders are not well understood, work-related physical risk factors include repetition rate, force, and posture.
Working with Jack Dennerlein at the Harvard School of Public Health, I conducted studies to characterize finger mechanics and motor control during tapping on a computer keyswitch, towards understanding the causes of upper-extremity musculoskeletal disorders and improved keyboard design. We tested several hypotheses, among them: 1) finger joints act similarly during tapping in terms of kinematics, torque production, and energy production; 2) A simple lumped-parameter model can describe finger impedance during tapping; and 3) Humans employ postures and generate horizontal forces against keyswitches that result in joint torque and energy transfer minimization. We collected simultaneous measurements of finger joint kinematics and endpoint force production during tapping on different types of computer keyswitches. These experiments show that finger joints act differently when tapping. The proximal (metacarpo-phalangeal) joint, flexes and produces the energy necessary to depress the keyswitch. However, during the contact phase of tapping, the distal joints extend and then flex, absorbing and releasing energy in a spring- like manner. A simple spring-damper model can describe the behavior of the distal joints. Humans do not appear to employ postures or patterns of force production that result in torque or energy transfer minimization during tapping on keyswitches (Jindrich et al. (2004) J.Biomech., 37: 1589-1596). We therefore proposed a new keyswitch design to reduce joint loading during typing (Balakrishnan, Jindrich and Dennerlein, Human Factors (2006) 48(1): 121-9).
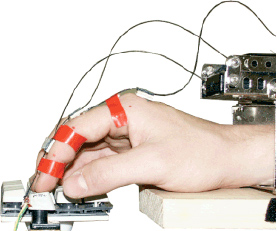
Finger mechanics during keyboard use
Current Research: At ASU, I initiated a collaboration with Kanav Kahol of the Department of Biomedical Informatics, Arizona State University, and with my former mentor, Jack Dennerlein, to continue this research to prevent potential injuries associated with multitouch and gestural input devices. We secured a $1.2 million grant from the National Science Foundation to perform this collaborative research.
The next generation of human-computer interfaces using gestural and multitouch technology is currently under development, and we are within a narrow window of opportunity to influence interface design to reduce injury risk. The overall objective of this project is to use basic research on hand and arm function while using gestural, multitouch systems (i.e. systems like Apple’s iPhone and iPad) to prevent future injuries associated with using these new types of human-computer interfaces. I worked with two undergraduate students (Brianna Angeleri and Josh Pfent) and a post-doctoral researcher (Cecil Lozano) to design and conduct experimental studies on the movements and muscle activities associated with multitouch tasks.
 Finger mechanics during multitouch device use
Finger mechanics during multitouch device useWe have completed several studies of the motor control of the hand and arm during multitouch interactions. Our results demonstrate that different gestures are associated with different levels of muscle activity and subjective discomfort. Muscle activity associated with multitouch devices is substantial despite the small forces required for these interactions.
We are also working to develop a complete, freely-accessible musculoskeletal model of the arm and hand (based on the OpenSim arm model developed by Scott Delp, Wendy Murray and Kate Holzbaur). I worked with an ASU graduate student (Jong-Hwa Lee) to use anatomical data from the literature to model the intrinsic muscles of the hand, adding to the existing simulation of the elbow and shoulder. We have published two papers from this study (Lee et al. 2015a, Lee et al., 2015b).
Research Plans at CSUSM
With the successful transfer of the NSF grant to CSU San Marcos and hiring of new post-doctoral researcher (Deanna Asakawa), the project is continuing. The complex, multi-joint gestures used in multitouch systems are poorly understood, and this project will provide information as to the potential for repetitive use injuries when using multitouch systems. The project will also contribute to a fundamental understanding of the mechanics and control of complex hand and finger movements. The information, recommendations, and simulation toolkit that emerge from this research will ultimately allow designers to create devices that reduce the potential for injury due to long-term use. We seek to provide designers of the next generation of technology interfaces with the tools necessary to make injury prevention a central design criterion. Both by its specific objectives, and the precedent it would set, we believe that this project could have an enormous impact on public health for years to come.
AREA 3: RESTORING FUNCTION FOLLOWING NEUROMOTOR INJURY
A third research effort of mine has been to use principles derived from basic research in biomechanics and motor control to restore function following neuromotor injury. I have focused on efforts to stimulate functional recovery following spinal cord injury (SCI), both by encouraging spinal repair and by developing engineering approaches to augment or replace motor output.
Background: In the U.S., approximately 10,000 people annually suffer spinal cord injury (SCI), and the population of chronically injured exceeds 250,000, including at least 42,000 veterans with spinal cord injuries (Stovers and Fine, 1986; VA, 2007). Paralysis resulting from neuromotor injuries incurs substantial direct and persistent medical costs. For example, yearly costs to the Veterans Health Administration were estimated to average $28,334 per person for cervical complete SCI to $16,792 for thoracic incomplete SCI (French et al., 2007). These direct costs, however, are potentially only a small fraction of the total costs associated with paralysis as they do not factor in other costs such as lost wages, unpaid care, and decreased productivity. Most importantly, however, paralysis exacts enormous personal costs on individuals and their families.
There are currently two broad categories of treatment aimed at functional recovery from neuromotor trauma or disorder. One is to strengthen the residual capacity of the person, for instance by training a limb or regenerating neural pathways. The other is to use a technological intervention, such as functional neuromuscular stimulation or robotics. Each of these approaches holds promise, and they are not mutually exclusive. For example, in addition to directly restoring the ability to activate and exercise muscles, neuromuscular stimulation can contribute to repairing the nervous system by encouraging adaptive plasticity. Consequently, neuromuscular stimulation is likely to be a component of many types of integrative approaches to functional restoration following SCI.
Current Research: Using ultrasound to activate spinal circuitry. Neuroprosthetic systems require some way to activate nerves and/or muscles. Pharmacological, electrical, magnetic, and photonic methods can be used to stimulate neuronal circuits. For example, although electrical stimulation represents a relatively simple method, it suffers from several drawbacks. Among them are that electrodes often must be chronically implanted using invasive procedures, and electrical stimulation can result in non-natural patterns of nerve recruitment (i.e. reverse-recruitment of muscle fibers). The recruitment of large, fatigable muscle fibers before small, fatigue-resistant fibers presents difficulties both for controlling muscle forces and for prolonged or repeated movements (such as locomotion). Although strategies for selective stimulation of neurons within nerves have been developed, they typically require complicated stimulus waveforms and invasive implantation of nerve cuffs.Working with Reggie Edgerton at UCLA among others, I have gained experience with both approaches to improving function following SCI. Space does not permit a discussion of all of the projects initiated in my lab related to restoration of function after SCI. Because Kinesiology does not have access to vivarium space at CSUSM, most of these projects cannot continue because they depend on rodent models. However one project may be possible if shifted to another animal model.
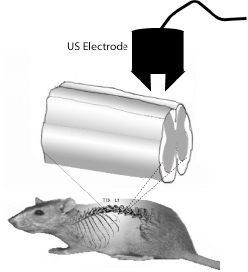
Spinal (CPG) and peripheral nerve stimulation using pulsed ultrasound
Consequently, I have initiated an effort to determine whether low-intensity, low-frequency ultrasound (LILFU) can be used for the noninvasive excitation or suppression of spinal and peripheral neurons with properties similar to biological activation. Recent in vitro data illustrate that LILFU is capable of exciting central neurons by activating voltage-gated sodium channels and voltage-gated calcium channels in a manner sufficient to elicit action potentials and trigger neurotransmitter release (Tufail et al., 2010). These observations raise numerous possibilities for the use of pulsed ultrasound (US) in controlling neuronal activity. However, explorations into the use of ultrasound (US) as a neurostimulation tool have been relatively sparse. Coupling its ability to directly stimulate neuronal activity and its noninvasive transmission through bone and other biological tissues in a focused manner, US holds promise as a potentially powerful neuromodulation tool. However, the potential for using ultrasound to stimulate spinal or peripheral neurons to generate functional muscle activation has not been thoroughly investigated.
Two important approaches to restoring function following spinal cord injury (SCI) could potentially benefit from minimally-invasive stimulation with US. First, direct stimulation of spinal circuitry, via general excitatatory (i.e. epidural) stimulation or through targeted microstimulation can lead to a wide range of behavior such as standing or different forms of locomotion depending on the stimulation parameters. LILFU presents the possibility of non-invasive excitation of spinal circuitry without requiring extensive surgical or pharmacological intervention, which would be useful in many rehabilitation contexts. Second, stimulation of peripheral nerves can be used therapeutically (to prevent muscle atrophy, for example), or in engineered systems to restore motor function through functional neuromuscular stimulation. Recent work has shown that stimulation of peripheral nerves using channelrhodopsin-facilitated optical excitation results in more normal muscle fiber recruitment patterns than electrical stimulation. This presents the additional question of whether the recruitment patterns elicited by LILFU stimulation are superior to those observed with electrical stimulation. At ASU, I worked with Jamie Tyler in the ASU School of Life Sciences and three undergraduate researchers (Zach Gilbert, Tasha Cheshko and Nikki Castel) to determine whether US can be used to activate spinal pattern generators and provide the basis for patterned locomotory movement. In November 2009 I submitted a Hypothesis Development Award proposal about this research to the Department of Defense that was selected as an Alternate. Although funding was ultimately not available, I am confident that this project could be externally supported in the near future.
Research Plans at CSUSM
A long-term plan is to investigate if using an invertebrate model (e.g. lobsters or crabs) is feasible.
STUDENT MENTORSHIP
My research is well suited to working with both undergraduate and graduate students. Research in neurophysiology and biomechanics draws analytical and experimental techniques from many fields, including functional morphology, comparative physiology, neuroscience, mechanical engineering and controls systems theory. Students working in the LIMB lab and associated courses are exposed to a diversity of theoretical paradigms and research techniques necessary to conduct integrative research on neuromuscular control. Although this research draws from many advanced techniques in biology and engineering, at the same time experiments in motor control are uniquely accessible to students. Experimental data on movement can often be directly visualized. Students are able to immediately apply concepts learned in basic biology and physics courses to problems involving motor tasks which are relevant and intuitive. Whole-body movements during locomotion or limb movements are familiar to students and provide a firm grounding which facilitates the understanding of more abstract concepts.
My approach to working with undergraduate students is based on the students assuming responsibility for individual projects and following the project through from start to finish. At the outset, I explain to students the level of commitment, initiative, and hard work that this entails. Over the course of the project, I try to meet with each student for one hour a week to discuss progress and help overcome any challenges that have arisen. There are also aspects of each project that require my support (i.e. writing animal care and use/human subjects protocols, purchasing equipment and supplies, computer programming and some aspects of data analysis). I perform these tasks as needed, often at the direction/request of the student. Although I maintain ultimate oversight of the direction of each project, I think that this partial inversion of roles furthers my educational objectives of encouraging students to be independent thinkers and actors. I am looking forward to involving more CSUSM students in my research.
Awards
HONORS
| Year Awarded | Award Title |
|---|---|
| 2002 | World Congress of Biomechanics Calgary Award finalist |
| 1996 | National Science Foundation Graduate Research Fellowship awardee |
| 1996 | Department of Defense Graduate Fellowship Honorable Mention |
| 1995 | Acceptance to the Santa Fe Institute's Complex Systems Summer School, full funding (attended) |
| 1990 | Pacific Rim Scholarship to attend the University of California's Education Abroad field biology course in Monteverde, Costa Rica |